






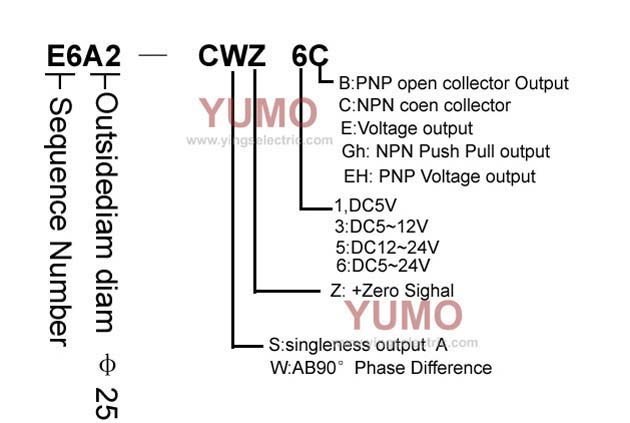
YUMO E6A2-CW3C 500ppr Mini Rotary
Model:E6A2-CW3C
Brand:YUMO
Code:YM00000041
online service

Welcome to our website! Please send your words at any time in the following form and ask us, we will contact you and provide you with the corresponding service as soon as possible. Please write in English.

ISL5815 Outer diameter 58mm Solid Shaft Incremental Encoder
Application in heavy duty, especially on CNC machine tools spindle
2 quadrature output channel (A&B) + index signal
Resolution up to 4096 cpr
Flange dimension 68*68

6mm 24VDC shaft incremental encoder E6B2-CWZ6C Rotary Encoder
Good reliability, long life, anti-jamming performance.
Stainless steel shaft has a higher stability and protection.
Metal shell is more solid and anti-impact.
Bearing load heavy, anti-oil and water.
Applicability to a wide variety of mechanical and industrial control.

ISC3004 Outer diameter 30mm Solid Shaft Incremental Rotary Encoder
Miniature size, easy assembling
2 quadrature output channel (A&B)
Housing size 30mm, shaft dia. 4mm

ISC3004-001G-200B-12-24C Outer diameter 30mm Solid Shaft Incremental Rotary Encoder
Miniature size, easy assembling
2 quadrature output channel (A&B)
Housing size 30mm, shaft dia. 4mm